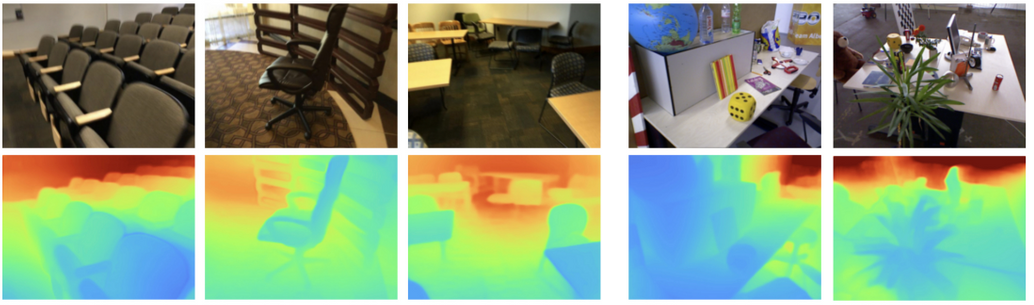
A depth covariance function with applications to geometric vision tasks
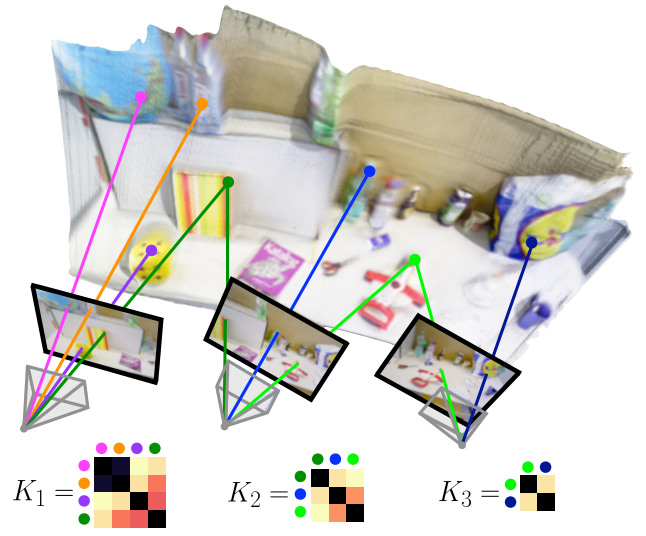
We propose learning a depth covariance function with applications to geometric vision tasks. Given RGB images as input, the covariance function can be flexibly used to define priors over depth functions, predictive distributions given observations, and methods for active point selection. We leverage these techniques for a selection of downstream tasks: depth completion, bundle adjustment, and monocular dense visual odometry.
Eric Dexheimer, Andrew Davison. , Learning a Depth Covariance Function. CVPR, 2023
The DepthCov software is available through the link on the right and is free to be used for non-commercial purposes. Full terms and conditions which govern its use are detailed here.
News 2018-2024












Contact us
Dyson Robotics Lab at Imperial
William Penney Building
Imperial College London
South Kensington Campus
London
SW7 2AZ
Telephone: +44 (0)20 7594-7756
Email: iosifina.pournara@imperial.ac.uk